Moment quadratique
Le moment quadratique est une grandeur qui caractérise la géométrie d'une section et se définit par rapport à un axe ou un point. Il s'exprime dans le Système international en m4 (mètre à la puissance 4, ou mètre bicarré [1]).
Le moment quadratique est utilisé en résistance des matériaux, il est indispensable pour calculer la résistance et la déformation des poutres sollicitées en torsion () et en flexion ( et ). En effet, la résistance d'une section sollicitée selon un axe donné varie avec son moment quadratique selon cet axe.



Le moment quadratique est encore trop souvent appelé moment d'inertie. A tort[1], car s'il présente de claires similitudes avec le moment d'inertie, il ne rend compte que de la répartition de la matière en son sein.
Définition générale
« Le moment quadratique axial d'une aire plane (section) par rapport à un axe situé dans son plan est la somme (intégrale) des produits de ses éléments par les carrés de leurs distances à l'axe. Le moment quadratique polaire d'une aire plane (section) par rapport à un point situé dans son plan est la somme (intégrale) des produits de ses éléments par les carrés de leurs distances au point. »[1]

- Moment quadratique de la section par rapport à l’axe :



- Moment quadratique de la section par rapport à l’axe :


- Moment quadratique (polaire) de par rapport au point-origine :

- puisque (théorème de Pythagore). IO peut aussi être qualifié de moment quadratique par rapport à l'axe (perpendiculaire au plan de la section), et noté Iz.



Il découle de ces définitions que plus les éléments de la section sont situés loin de l'axe, plus le moment quadratique est important.
Application de la définition

Pour une section carrée de côté centrée en :

- Moment quadratique par rapport à :
![{\displaystyle {\begin{aligned}I_{x}&=\iint _{S}y^{2}\,\mathrm {d} x\,\mathrm {d} y=\left(\int _{-{\frac {a}{2}}}^{\frac {a}{2}}\mathrm {d} x\right)\cdot \left(\int _{-{\frac {a}{2}}}^{\frac {a}{2}}y^{2}\,\mathrm {d} y\right)\\&=\left[{\frac {a}{2}}-\left(-{\frac {a}{2}}\right)\right]\cdot {\frac {1}{3}}\left[\left({\frac {a}{2}}\right)^{3}-\left(-{\frac {a}{2}}\right)^{3}\right]={\frac {1}{3}}a\left({\frac {a^{3}}{8}}+{\frac {a^{3}}{8}}\right)\\&={\frac {a^{4}}{12}}\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/63892a50a43f5d749f0f78a85189683e383a2d75)
- Moment quadratique par rapport à :
- Par un calcul similaire, ou plus simplement en raison de la symétrie de la section :

- Moment quadratique par rapport au point :
- Comme :


Formules pour les sections usuelles
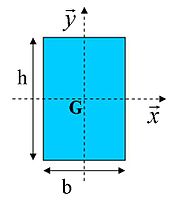
Section rectangulaire
- où α dépend de l'élancement de la section[2] (cf. Torsion).



Section circulaire



Section annulaire

Il s'agit simplement de soustraire le moment quadratique du disque intérieur à celui du disque extérieur.


Formule de transport
Le moment quadratique d'une section dont le barycentre passe par un axe parallèle à un axe de référence à une distance vaut, d'après le théorème de transport de Huygens :




Ceci exprime que le moment quadratique est égal à la somme du « moment propre » et du « moment de translation » .


Exemple pour une section complexe

Poutre en I
On décompose la poutre en 3 parties, les deux semelles et l'âme. On fait la somme des moments quadratiques de chaque section. Si on choisit l'axe neutre comme axe de rotation, on doit utiliser le théorème des axes parallèles (transport) pour le moment quadratique des semelles :

avec et l'épaisseur et la hauteur de l’âme et et la largeur et l'épaisseur d'une semelle.




Il est également possible de considérer une section rectangulaire de largeur et de hauteur à laquelle il faut soustraire l'inertie de la portion considérée en trop, soit une autre section rectangulaire de largeur et de hauteur . La formule devient alors :



Les semelles sont les parties qui subissent la plus grande déformation. Ces parties sont donc plus larges, afin d'offrir une meilleure résistance à la déformation, tout en réduisant l'âme afin de gagner du poids. L'âme sert à écarter les semelles afin d'augmenter leur moment quadratique. Ainsi, à aire équivalente, le moment quadratique d'une section en I est beaucoup plus grand que celui d'une section carrée, d'autant plus que les épaisseurs — surtout celle de l'âme — sont faibles.
Ces poutres sont donc largement utilisées en génie civil et en mécanique car elles permettent des économies de matière.
Application aux composites, sandwich
En utilisant pour ces parties un matériau plus résistant aux contraintes (cf. Déformation élastique) ou ayant un module de Young plus élevé, on peut donc considérablement augmenter ses caractéristiques mécaniques. Pour l'âme, on peut alors utiliser un matériau de résistance moindre mais plus léger, celui-ci étant soumis à de moins grandes déformations.
Ce principe est utilisé abondamment dans la fabrication de bateaux en matériaux composites : l'âme est faite en mousse ou dans un matériau de faible densité (par exemple un polymère ou du balsa) et les semelles sont en fibres (verre, carbone, …). Ce type de fabrication est appelé sandwich dans le milieu nautique, à cause de cette structure en 3 feuilles superposées.
Références
Voir aussi
Articles connexes
 Portail de la physique
Portail de la physique











